")
İçindekiler:
- Yazar John Day day@howwhatproduce.com.
- Public 2024-01-30 13:18.
- Son düzenleme 2025-01-23 15:13.



Merhaba arkadaşlar..
Hiç Android Akıllı Telefonunuzdan kontrol edilebilen bir labirent Tahtası yapmak için dolaştınız mı….!
Peki doğru yerdesiniz. Arduino ve android kullanarak kendim için bir tane yaptım.
Endişelenme kolay,.. Bu projede size nasıl yapılacağını göstereceğim:
1. Labirent Tahtası (eski tahta kutulardan yaptım).
2. Panoyu kontrol etmek için uygulama mucidinde Android uygulaması.
3. Kartı kontrol etmek için Arduino'da programın yazılması ve
4. Devreyi kurmak ….
Öğrenilen konsepti daha sonra kuracağınız diğer projelerde de kullanabilirsiniz..
O halde daha fazla vakit kaybetmeden başlayalım….!
Adım 1: Bileşenlerin Toplanması



Bu proje için aşağıdaki öğelere ihtiyacınız olacak:
1. İki servo motor (mini motorlar kullandım ve onlar benim için çalıştı).
2. Arduino Uno.(Snapdeal'den almanızı öneririm, klonu ama harcadığım her kuruşa değiyor)
3. Bir Bluetooth modülü.
4. Bir Ekmek Tahtası.
5. Bazı atlama telleri
6. İnce ahşap veya sert tahtalar
7. çiviler, eski klavyelerden bazı tuş çubukları
8. Termokol (Polistiren)
Adım 2: Labirent Panosunu Yapmak



Bu projenin mekanik kısmı..
İlk olarak, taban için uzun dikdörtgen bir tahta veya karton parçası alın. gerçek devirme tahtasından daha büyük olmalıdır..
İki küçük eşit boyutta küboid ağaç kesin..
ve her birine tabandan aynı yükseklikte olacak şekilde birer çivi ekleyin. Ayrıca sütunlara destek olarak eklemek için fazladan bir parça tahta kesin.
şimdi üst tahta için..
tabandan daha küçük bir çerçeve yapın, bu bizim x eksenimiz olacak, çerçevenin daha küçük kenarlarının dış yüzünde, kenarların tam ortasında küçük delikler açın. çubukları ikiye bölün ve çerçevenin içe bakan geniş kenarlarına yapıştırın. Bunu yapmadan önce onları ikiye bölün.
bu, üst paneli çerçeveye tutacak ve dönmeye yardımcı olacaktır.
Şimdi çerçevenin taban üzerinde durmasını sağlamak için sütunları dış deliklere ekleyin.
sütunları tabana yapıştırın ve ayrıca destekleri onlara takın.
Şimdi servo motorları eklemek için.
biri tabana bağlanacak ve çerçeveyi döndürmek için küçük bir çubuk kullanılarak çerçeveye bağlanacaktır.
bir diğeri çerçeveye takılacak ve üst panoyu döndürmek için küçük bir çubuk kullanılarak üst Panoya bağlanacaktır.
servolar resimlerde gösterildiği gibi birbirine dik olarak monte edilmelidir.
şimdi tahta hazır.
Labirenti termokol ve karton kullanarak yaptım.
Adım 3: Devreyi Kurmak

Devreyi resimdeki gibi kurunuz…
Kullandığım servolar için kırmızı kablonun pozitif, kahverenginin negatif ve turuncunun sinyal olduğunu unutmayın.
Bluetooth modülü
Rx pin 1'e gider
Tx pin 0'a gider
Baz servonun sinyal kablosu pim 5'e gider
Çerçeve servosunun sinyal kablosu pim 6'ya gider
Servo ve bluetooth modülü için ek güç kaynağı eklemeyi unutmayın.. diğer akıllı modül yeterince akım almayacak ve bağlantıyı kesmeye devam edecek, hata 516'yı gösterecek. Sorun gidermede çok sorun yaşadım ve sonunda sorunu ve çözümü buldum.
4. Adım: Uygulamayı Yapma


Tamam, her şeyden önce, herhangi bir uygulama yapmak için mit uygulama mucitinde oturum açmanız gerekir.
appinventor.mit.edu/explore/ adresine gidin
ve Uygulama oluştur'a tıklayın! hangi sağ üst köşede, kaydolun ve gitmeye hazırsınız….
Videoda gösterdiğim diğer her şey.. bir göz atın.
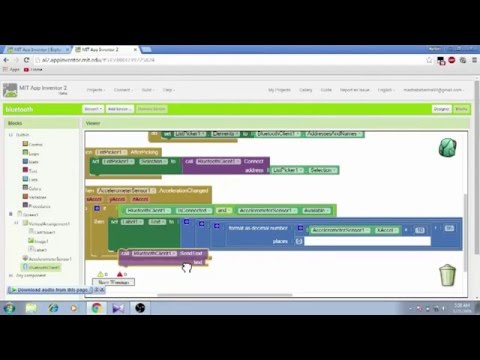
işte temel:
ekran uygulamada başlatıldığında (Bu durumda Ekran1'dir), - ivmeölçer Sensörü etkinleştirildi ve hassasiyet maksimum yani 3'e ayarlandı.
şimdi liste seçiciye bastığımızda
-Eşleştirilen cihazları listeleyen bir liste açılır.
(uygulamayı açmadan önce modülü eşleştirmeniz gerekir, normal olarak çift kodu 1234'tür)
Şimdi liste seçiciyi seçmeden önce, - listeyi eşleştirilen cihazlar ve adresleri ile ayarlayın
Cihazı seçtikten sonra
-Bluetooth adaptörü seçilen cihaza bağlanacaktır
Şimdi modül bağlı
AcclerometerSensor verileri değiştirildiğinde
-Verileri etiket metnine ekleyin ve bluetooth gönderimi ile gönderin.
Şimdi zor kısım iki veriyi aynı anda göndermektir.
# ivmeölçer verileri sola yatırıldığında 0 ile 9,5 arasında ve sağa yatırıldığında 0 ile -9.5 arasında değişir, telefon aşağı ve yukarı doğru eğildiğinde de aynı şey geçerli..
yani göndermemiz gereken x ve y ekseni eğim verilerimiz var…
x ekseninin verileri X ve y ekseninin verileri Y olsun
yani yaptığım şey şu:
Text="(X*10(bundan sonra ondalık basamakları kaldırın)+95)*1000(1000 ile çarpın)+Y*10(ondalık basamakları kaldırın)+95"
yani şimdi veriler her eksen için 0 ile 190 arasında değişiyor ve ilk 3 hanenin x ekseni ve son 3'ün y ekseni koordinatları olduğu 190180 yapmak için eklendi…
bluetooth modülüne gönderilecek ve gerçek verilere ayrılacak ve arduino kodunda servo dönüş açıları ile haritalanacak…
Adım 5: Arduino Kodunu Yazma


Uygulama tamamlandıktan sonra kodla başlayalım kodu yükledim indir, derleyip arduinoya gönder ama kodu göndermeden önce bekle bluettoh modülünün rx ve tx pinlerini arduino kartından çıkar ve kodu gönder bundan sonra pimleri geri takabilirsiniz..
bluetooth'dan alınan kod, eksen verilerimizi içeren bir dizedir..
şimdi Serial.parseInt(); dizeyi okumak ve dizeyi bir pos değişkeninde int'ye dönüştürmek için kullanılır.
şimdi pos değerine sahip = 190180 (diyelim ki) amacımız şimdi verilerin şifresini çözmek, yani x ekseni ve y koordinatlarını kaldırmak
x ekseni için. değeri 1000'e bölün, bu 190.i.e değeri/1000 = 190 verir
ve y ekseni modüler için değeri 1000'e bölün, bu bize 180 yani %1000 = 180 değerini verecektir.
şimdi tahtayı eğmek için istediğiniz servoların maksimum ve minimum konumunu hesaplayın, … benim durumumda 180 ve 75 ve ….
şimdi x ve y eksenini koordine ettik, şimdi sadece servolarımız için istediğimiz minimum ve maksimum dönüş açıları ile koordinatları haritalamamız gerekiyor….
ayrıntılar için koda bakın.
Ve işimiz bitti… kodu yükleyin, uygulamayı açın ve oynayın….
Google'ın kendisi için bir tane yaptığını ve şimdiye kadar gördüğünüz çok büyük bir labirent olduğunu biliyor musunuz?
Bir dahaki sefere kadar iyi eğlenceler..
Önerilen:
Arduino Kullanarak 3 Boyutlu Labirent Oyunu: 8 Adım (Resimlerle)
")
Arduino ile 3d Labirent Oyunu: Merhaba arkadaşlar bugün ARDUINO UNO kullanarak bir labirent oyunu yapacağız.Arduino Uno en çok kullanılan tahta olduğu için onunla oyun yapmak çok güzel. Bu Eğitilebilir Kitapta, joystickler kullanılarak kontrol edilen labirent oyununu yapalım. Unutma
Arduino - Labirent Çözen Robot (MicroMouse) Duvar Takip Robotu: 6 Adım (Resimli)
 Duvar Takip Robotu: 6 Adım (Resimli)")
Arduino | Labirent Çözen Robot (MicroMouse) Duvar Takipçi Robot: Hoş Geldiniz Ben Isaac ve bu benim ilk robotum "Striker v1.0". Bu Robot basit bir Labirenti çözmek için tasarlandı. Yarışmada iki labirentimiz vardı ve robot onları tanımlayabildi. Labirentteki diğer herhangi bir değişiklik, labirentte bir değişiklik gerektirebilir
Arduino ve Android Uygulamalı Kişiselleştirilebilir Lazer Labirent: 13 Adım (Resimlerle)
")
Arduino ve Android Uygulaması ile Özelleştirilebilir Lazer Labirent: Çocuk kitaplarından otomatik labirent çözme robotuna kadar birçok labirenti görün. Burada lazer yansımasını kullanarak bir labirenti çözerken farklı bir şey deniyorum. Başlangıçta çok kolay olduğunu düşünüyorum ama ucuza yapın, doğruluk için daha fazla zamana mal olur. Eğer biri yapmak isterse
Arduino Cep Oyun Konsolu + A-Labirent - Labirent Oyunu: 6 Adım (Resimli)
")
Arduino Cep Oyun Konsolu + A-Labirent - Labirent Oyunu: İlk öğreticime hoş geldiniz! Bugün sizlerle paylaşmak istediğim proje, Arduboy ve benzeri Arduino tabanlı konsollar kadar yetenekli bir cep konsolu haline gelen Arduino labirent oyunu. Expo sayesinde (veya sizin) gelecekteki oyunlarım ile parlatılabilir
Arduino RFID Labirent Oyunu: 6 Adım (Resimlerle)
")
Arduino RFID Labirent Oyunu: Bugün Arduino için küçük bir RFID labirent oyununu nasıl bir araya getirdiğimi göstereceğim. Kod ve 3D baskı dosyaları dahil edilmiştir, bu yüzden aşağıdaki adımları izleyerek kendinize bir tane yapmaktan çekinmeyin! Çocuklar için sanal bir karışım yapacak bir oyuncak yapmak istedim