: 8 Adım (Resimlerle)")
İçindekiler:
- Adım 1: Proje için Malzemeler
- Adım 2: Bölüm 1: Writer için Liner Motion Oluşturma
- Adım 3: Bölüm 2: Yazar Kafası (Yukarı ve Aşağı Hareket)
- Adım 4: Bölüm 3: Kağıt Rulo
- Adım 5: Bölüm 4: Bluetooth Modül Entegrasyonu
- Adım 6: Bölüm 5: Tümünü Birleştirin
- Adım 7: Devreyi Kompakt Yapın
- Adım 8: Braille Yazdıralım
- Yazar John Day day@howwhatproduce.com.
- Public 2024-01-30 13:20.
- Son düzenleme 2025-01-23 15:13.


Herkese merhaba, Bütün bunlar basit bir XY çizici ile başladı, başarılı bir şekilde tamamladıktan sonra, basit bir konuşmadan braille metin dönüştürücü geliştirmeyi düşündüm. İnternette aramaya başladım ve beklenmedik bir şekilde fiyatlar çok yüksekti, bu beni küçük, taşınabilir ve ucuz bir yazar inşa etti.
Yapmayı düşündüğümüz her şeyin var olabileceğini ya da en azından birileri tarafından denenmiş olabileceğini bildiğimiz için böyle bir yazı makinesi aramaya başladım. küçük taşınabilir ve kullanımı kolaydır.
Dürüst olmak gerekirse, Arduino'da yeniyim ve hala öğreniyorum. Başarılı bir XY çizici kurabildim, böylece umutlarım yüksekti, aynı bilgiyle kendi küçük braille yazıcımı çıkarabiliyorum. Bu süreçte öğrendim. çok fazla ve sonunda sadece 2 hafta içinde geliştirebildim.
İşte burada basit bir braille yazarının nasıl oluşturulacağı anlatılıyor.
Adım 1: Proje için Malzemeler
- Arduino Nano
- A4988 Step sürücü
- Bluetooth Seri Alıcı-Verici Modülü
- CD sürücüsü step motor kaydırıcı lineer kılavuz mikro
- 2 adet 360 derece dönebilen servo motor
- 1 adet 180 derece servo motor
- 2 adet enjeksiyon şırıngası (Sağlık deposunda)
- 1 adet şeffaf akrilik levha
- Çift Taraflı Köpük Bant
- Fevi Kwik
- Erkek-Dişi atlama teli
- Kesici aletler ve tornavida seti.
- Jel / Tükenmez Kalem
- Bluetooth özellikli Cep Telefonu
- APP: Arduino Ses Kontrolü
Şimdi onu inşa edelim
-
Toplam proje 4 küçük parçaya bölünebilir
- Liner modülü Kurulumu (A4988 sürücüsünü kullanarak)
- Yazarın kafası için yukarı ve aşağı hareket oluşturma
- Kağıt haddeleme için rulo
- Bluetooth entegrasyonu
- Sonunda, projeyi tamamlamaya yol açacak tüm parçaları bir araya getirmeniz gerekiyor.
Adım 2: Bölüm 1: Writer için Liner Motion Oluşturma

Kağıda bir şeyler yazmak için ileri geri hareket etmemiz gerekiyor. Farklı yöntemler kullanarak bu tür mekanik hareket oluşturmak için birçok video var. Ancak step motor kullanarak bunu yüksek doğrulukla çok kolay bir şekilde yapabiliriz.
Bu yüzden mekanik malzeme oluşturmaktan kaçınmak için bir sürgü ile gelen step motor kullandım, kendiniz yapabilirsiniz, eğer kendiniz yapmakla ilgileniyorsanız, bu bağlantıyı takip edebilirsiniz.
Mekanik kısım bittiğinde, elektrik konfigürasyonunu yapmak için adımları takip etmeliyiz.
- Devre konfigürasyonunu yapmak için resmi takip edin.
-
koyduğunuzdan emin olun
- Pin 6: Etkinleştir
- Pin 5: Adım
- Pin 4: Yön
- Arduino nano'nuza basicMove2 kodunu yükleyin ve seri monitörü açın ve iletme için "f" ve geri "b" kullanın ve devrenizi test edin. Doğru doğrusal hareketi elde edip edemediğinizi kontrol edin.
- Bir dizi fbfbffbbfffbbb like komutunu da kullanabilirsiniz.
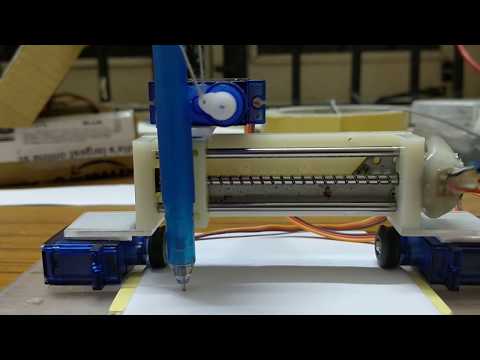
Adım 3: Bölüm 2: Yazar Kafası (Yukarı ve Aşağı Hareket)
")
")
")
")
Yukarı ve aşağı hareket yapmanın farklı yolları vardır. Bir solenoid aktüatör kullanarak yapabilirsiniz. Ama burada bunun için bir servo motor yardımıyla basit bir kalem kullanıyorum.
- Çıkarılabilir bir yedeği olan herhangi bir basit tükenmez kalemi alın.
- Dolguyu içeri ittikten sonra üstte bir delik açın, deliğinizin kalemin her iki yanından geçmesine ve doldurmaya dikkat edin.
- Dolumda başka bir delik açın ve ona bir ip ekleyin.
- Dolguyu geri koyun ve yeniden doldurma deliğinin altında kalemde bir delik açın, yeniden doldurmadan en az 2-3 cm aşağıda yaptığınızdan emin olun.
- Şimdi kalemle üstüne elastik bir lastik bağlayın ve yeniden doldurun.
- 180 derecelik Servo motoru kullanın ve 0 dereceye ayarlayın ve ipi nob'a takın.
- Şimdi nob saat yönünün tersine 180 döndüğünde, yedek dışarı çekilecek ve üstteki elastik bant nedeniyle 0 dereceye geri döndüğünde tekrar içeriye dönecektir.
- Sinyal pimini Arduino nano'daki 8 numaralı pime takın.
- Arduino nano'nuza basicMove2 kodunu yükleyin ve seri monitörü açın ve "n" kullanın ve devrenizi test edin.
- nnnnnnnnn komut dizisini de kullanabilir ve çalışıp çalışmadığını kontrol edebilirsiniz.
- Arzu hareketini elde etmek için dönüş açısını azaltın.
Adım 4: Bölüm 3: Kağıt Rulo



Şimdi kağıt rulo, en ilginç ve zorlu kısım.
- Enjeksiyon şırınga kauçuğunu çıkarın.
- Plastik dişliyi daire şeklinde kesin.
- Kauçuğun içine koyun ve biraz tutkal uygulayın.
- Servoyu takın ve tutkalla sabitleyin.
- Yukarıdaki gibi bir tane daha oluşturun.
- Sinyal pinini Arduino nano'daki 9 ve 10 numaralı pinlere takın.
- Arduino nano'nuza basicMove2 kodunu yükleyin ve seri monitörü açın ve "p" kullanın ve devrenizi test edin.
- Bir dizi pppppppppp komutunu da kullanabilir ve çalışıp çalışmadığını kontrol edebilirsiniz.
- İstenilen hızı elde etmek için dönüş açısını azaltın.
- Servo içinde bulunan potansiyometreyi değiştirerek hızı ayarlamaya çalışın.
- Döndürmeyi aynı yönde ve hızda yapın (bu en önemli ve sıkıcı iştir).
Adım 5: Bölüm 4: Bluetooth Modül Entegrasyonu

Bu kısım en kolay kısımdır.
- Yukarıdaki devre konfigürasyonunu yapın ve yapılır.
- Arduino Ses Kontrolünü kullanarak sesli komut göndermenize yardımcı olacaktır.
- Google'da "Arduino Bluetooth modülü hc-05" için arama yaparsanız harika örnekler bulacaksınız.
Adım 6: Bölüm 5: Tümünü Birleştirin



Şimdi dört parçamızı da birleştirelim.
- Sayfayı temizleyin.
- Çift bant kullanarak servo motorunu şekildeki gibi ekleyin.
- Lineer kaydırıcıya ekstra plastik parça takın ve iki servonun üstüne yerleştirin.
- Kağıt rulosuna paralel yerleştirdiğinizden emin olun.
- Şimdi kalem kafasını takın, yüzeye temas etmediğinden emin olun ve servo dönüşünde bant üzerinde bir delik açmalıdır.
- Pin Arduino nano'yu takın.
- Arduino nano'nuza basicMove2 kodunu yükleyin.
-
Seri monitörü açın ve tüm komutları kontrol edin
- f iletmek için
- b sırt için
- kağıt haddeleme için p
- n kalemi yukarı ve aşağı hareket ettirmek için.
- Tüm işlevler doğrulandıktan sonra artık Braille'i yazdırmaya hazırdır.
Adım 7: Devreyi Kompakt Yapın




Devreyi küçük ve tek bir devre tahtasında yapmak için görüntüyü akıtın.
Adım 8: Braille Yazdıralım

- Brallie.ino dosyasını açın, Arduino IDE'nin seri monitörünü açın.
- Kağıdı yuvarlanan kağıt motorunun altına koyun.
- Komutta biraz boşluk, yani (" ") gönderin ve enter'a tıklayın.
- Kağıt içeri kayar.
- Yazarın kafasından geçene kadar yapın.
- Daha sonra komutunuzu monitöre, asıl metni gönderebilirsiniz.
- Bluetooth uygulamasını açın ve Bluetooth'a bağlanın ve sesli komut gönderin.
- braille dilini görmek için kağıdı çevirin.
- Merhaba, merhaba ve hoş geldiniz gibi birkaç kelime denedim, örnek çıktı kağıdını görebilirsiniz.
-
Size özel sonuçları almak için kodda aşağıdaki parametreleri değiştirebilirsiniz.
- Braille sütunları arasındaki boşluk: int adımlar = 30;
- Braille'deki ilk iki nokta ile sonraki iki nokta arasındaki satır aralığı: int paperLine = 250;
- Doğrusal kaydırıcının hızı: int stepperDelay = 500;
- Yazar kafasının hızı: int servodelay = 500;
- Satır başına karakter sayısı: int n = 10;
Önerilen:
Arduino Mors Kodu Yazarı: 7 Adım (Resimli)
")
Arduino Mors Kodu Yazarı: Herhangi bir metni Mors koduna dönüştürebilen ve sonra yazabilen bir robot yaptım! Karton ve Lego'dan yapılmış ve elektronik için Arduino ve sadece iki motor kullandım
MOLBED - Modüler Düşük Maliyetli Braille Elektronik Ekran: 5 Adım (Resimlerle)
")
MOLBED - Modüler Düşük Maliyetli Braille Elektronik Ekran: Açıklama Bu projenin amacı, ekonomik bir elektronik Braille sistemi oluşturmak ve bu teknolojiyi herkesin kullanımına sunmaktır. İlk değerlendirmeden sonra, böylece bireysel karakterin tasarımının h
Braille Astronomi: 8 Adım (Resimlerle)
")
Braille Astronomi: Astronomi / astrofotografi dünyasını körler ve zayıf görenlerle paylaşmak istedim. Bu proje bunu birkaç malzeme ile basit bir şekilde ve ucuza yapacak
Ucuz Braille Embosser (La Picoreuse): 19 Adım (Resimlerle)
: 19 Adım (Resimlerle)")
Ucuz Braille Embosser (La Picoreuse): Sunum"La Picoreuse" ucuz (75€), yapımı kolay bir A4 braille kabartmadır. Bu proje, çok pahalı piyasa kabartmalarına bir alternatif sağlamak için diğer üreticiler için bir ilk adım veya yansıma temeli olarak hizmet etmeyi amaçlamaktadır
OpenBraille, Kendin Yap Braille Kabartma Yapıcısı: 12 Adım (Resimlerle)
")
OpenBraille, bir DIY Braille Embosser: Yardımcı teknolojinin ne kadar pahalı olduğunu öğrendiğimde oldukça şaşırdım. Mekanik bir braille kabartmanın maliyeti 1000$ USD'nin üzerinde ve bir elektrik 3000$'dan 5000$'a kadar çıkıyor. Bir arkadaşım için bir tane yapmakta zorlanıyorum ama bir DIY versiyonu bulamadım, bu yüzden ben de